Once the robot has entered camera
view
l
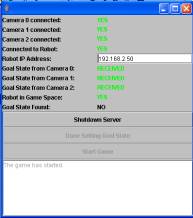
The server connects to
the robot
l
The server creates the
Navigator class to
navigate the robot